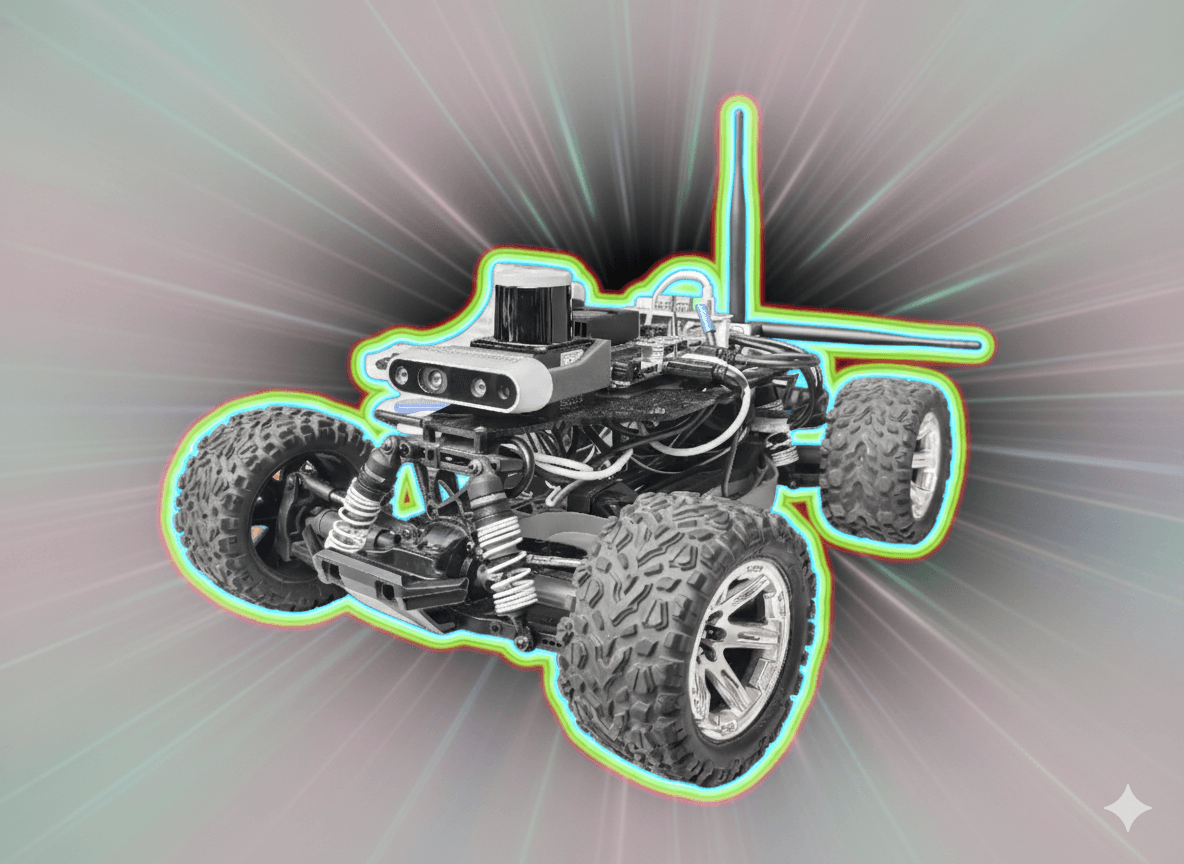
F1TENTH Autonomous Driving Platform
Advanced Autonomous Racing with Autoware Integration
January 2025 - Present
Individual Project
Project Overview
This project implements a complete autonomous driving solution on the F1TENTH racing platform, leveraging Autoware's sophisticated autonomous driving stack combined with custom sensor integration and real-time processing capabilities.
Key Features
Sensor Fusion
Advanced integration of Intel RealSense camera and Hokuyo LiDAR for comprehensive environmental perception
Autoware Integration
Full implementation of Autoware's autonomous driving stack optimized for racing scenarios
Real-time Processing
High-performance algorithms ensuring sub-millisecond response times for racing applications
Path Planning
Advanced trajectory optimization algorithms designed for high-speed cornering and obstacle avoidance
Technologies & Tools
AutowareROS2Intel RealSenseHokuyo LiDARC++PythonSLAMComputer VisionNav2PCL
Challenges
- Real-time processing constraints for high-speed autonomous navigation
- Sensor fusion complexity with multiple data streams from LiDAR and camera
- Path planning optimization for racing scenarios with tight corners
- Integration challenges between Autoware components and custom modules
Key Achievements
- Successfully integrated Autoware with F1TENTH hardware platform
- Achieved real-time sensor fusion with sub-10ms latency
- Implemented custom perception modules for track detection
- Optimized path planning algorithms for racing performance
Future Enhancements
Implementation of machine learning models for improved perception
Advanced trajectory optimization using reinforcement learning
Multi-vehicle coordination and communication protocols
Integration with simulation environments for testing and validation